دوستان عزیز نقشهبردار همان طور که اطلاع دارند یکی از مواردی که پس از اخذ پروانه اشتغال به کار نظام مهندسی میتوانند به آن بپردازند، تفکیک آپارتمانها است. تفکیک آپارتمان عبارت است از تخصیص سندهای مستقل به واحدهای آپارتمانی ملکی که خود دارای سندی واحد است. عملیات تفکیک آپارتمانی توسط کارشناسان نقشهبرداری که عضو سازمان نظام مهندسی هستند (دارای پروانه اشتغال به کار و گواهینامه تفکیک آپارتمانی) با اندازه گیریهای زمینی و متعاقباً در یک سیستم رایانه ای انجام میگیرد. جهت اخذ گواهینامه تفکیک آپارتمان، پس از اخذ پروانه اشتغال بایستی به دفتر تفکیک آپارتمان شهر خود مراجعه نموده و جهت شرکت در دوره های آموزشی ثبت نام فرمایند و پس از گذراندن این دوره ها گواهینامه تفکیک آپارتمان را دریافت کنید. در خصوص دوره های آموزشی اولاً هزینه ای که دریافت میشود بسیار زیاد میباشد. دوم اینکه اصلاً این سیستم ثبت بسیار کار را سخت کرده است. به هر صورت کسانی که بخواهند به تفکیک آپارتمانها بپردازند بایستی نحوه کار را فراگیرند که بخش عمده از آن کار با رابطهای کاربری اداره ثبت اسناد و املاک میباشد...
تحليل ورق تحت بار درون صفحه اي به روش اجزاء محدود با استفاده از نرم افزار متلب
اجزاء محدود غیر خطی پروفسور عیسی سلاجقه
تحلیل تیر سراسری با استفاده از نرم افزار متلب
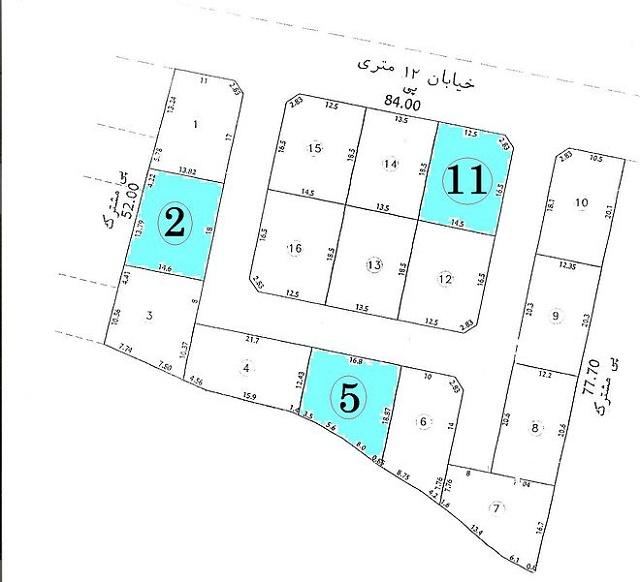
جزوه آموزش اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر، مشتمل بر 7 فصل، 170 صفحه، به زبان فارسی، با فرمت pdf، به ترتیب زیر گردآوری شده است:
فصل 1:
- اصول تفکیک آپارتماني
- تفكيك آپارتماني
- CD عرصه
- تفكيك عرصه مالكيت و تجميع اسناد
- زير بنا، مبناي محاسبات تفكيك آپارتماني
- اضافه پرداخت
- برداشت زميني ملك
- اندازه گيري زوايا
- طراحي پاركينگ
- عمليات تهيه محدوده عرصه
فصل 2:
- رقومي سازي عمليات تفكيك
- ترسيم در محيط اتوكد
- فولدربندي يك پروژه تفكيك
- بستر سازي اوليه براي محيط واسط كاربر
- كپي فايل هاي واسط و بروز رساني آنها
- نصب ساير نرم افزار
- قرار دادن ShortCut هاي چهارگانه روي DeskTop
مجموعه آموزش روش اجزای محدود مقدماتی
تحلیل اجزاء محدود خرپای فضایی با نرم افزار آباکوس
تحلیل اجزاء محدود خرپای دو بعدی با نرم افزار متلب
فصل 3:
- مقدمات نصب اوراكل
- پائين آوردن سطح امنيتي ويندوز
- ايجاد كارت شبكه مجازي
- ويرايش فايل Hosts
- نصب اوراكل
فصل 4:
- ايجاد پايگاه داده و اَبر كاربر GIS در نرم افزار اوراكل
- چيدمان محيط واسط كاربر، پنجره MGE
- چيدمان محيط واسط كاربر، تعريف كاربر نظام مهندسي
- ايجاد دسترسي كاربر تعريف شده به پايگاه داده
- قطع سطح دسترسي
- چيدمان محيط واسط كاربر، تعريف كاربر 99 GIS
- كُدها و سطوح دسترسي
- نحوه درج Zone UTM و نام رئيس اداره ثبت در پايگاه داده
- چيدمان محيط واسط كاربر،خواندن محتويات CD اداره ثبت
- چيدمان محيط واسط كاربر، اتصال كاربر نظام مهندسي به پايگاه داده
فصل 5:
- چيدمان در محيط اتوكد
- كشف پلاك ثبتي همسايه هاي مجاور ملك (اصلي و فرعي)
- عمليات تفكيك
- شروع تفكيك
- شماره گذاري طبقات
- تبديل خطوط
- ايجاد برچسب
- بازيابي مجدد فايل UpBuild.dwg
فصل 6:
- پردازش اطلاعات
- خطاهاي پردازش و نحوه رفع آن
- ذخيره فايل هاي پردازش شده
- حذف اطلاعات طبقه جاري
- حذف كامل اطلاعات از پايگاه داده
فصل 7:
- چاپ
- كشف پلاك ثبتي ملک (اصلي و فرعی)
- عمليات چاپ براي هر طبقه
- نقشه جديد
- اصلاح نقشه
- عمليات چاپ براي هر واحد
- توليد خروجي نهائي از پايگاه داده
- نحوه فراخواني يك پروژه تفكيك انجام شده
- تغيير محدوده عرصه از طرف اداره ثبت و نحوه مديريت پروژه
بررسی رفتار سازه های لوله ای مهاربندی شده در ساختمان های بلند تحت اثر نیروی زلزله
طراحی سازه و نحوه اضافه کردن مقطع دلخواه در نرم افزار کتیا
اتوکد سیویل سه بعدی

جهت دانلود جزوه آموزش اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر، بر لینک زیر کلیک نمایید.
اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر
جهت دسترسی به آموزش های بیشتر بر لینک های زیر کلیک نمایید:











 برتر فایل
برتر فایل تکنولوژی ماشینکاری
تکنولوژی ماشینکاری ماشین های ابزار
ماشین های ابزار راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط
راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر
جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM
پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM کتاب ماشین های تزریق پلاستیک
کتاب ماشین های تزریق پلاستیک دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator
دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator در نرم افزار CATIA") نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA
نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA جزوه آموزش PLC S7-300
جزوه آموزش PLC S7-300 آموزش ویدیویی نرم افزار متلب Matlab به زبان فارسی - بخش هشتم
آموزش ویدیویی نرم افزار متلب Matlab به زبان فارسی - بخش هشتم دانلود نرم افزار محاسبات گرمایش از کف LoopCAD
دانلود نرم افزار محاسبات گرمایش از کف LoopCAD شبیه سازی با نرم افزار سالیدورکس
شبیه سازی با نرم افزار سالیدورکس.png "آموزش کاربردی نرم افزار اتودسک اینونتور 2012 (Mastering Autodesk Inventor)") آموزش کاربردی نرم افزار اتودسک اینونتور 2012 (Mastering Autodesk Inventor)
آموزش کاربردی نرم افزار اتودسک اینونتور 2012 (Mastering Autodesk Inventor)