DMU Kinematic Simulator يكي از بخش هاي مهم مجموعه Product Synthesis است كه در آن مكانيسم شبيه سازي و تحليل مي شود. اين مكانيسم مي تواند مكانيسم حركت يك بيل مكانيكي يا مكانيسم باز شدن ارابه فرود يك هواپيما باشد. در واقع در اين محيط ويژگي "حركت" به محصول افزوده مي شود. در DMU Kinematic Simulator ارتباط قطعات با استفاده از 16 نوع اتصال (Joint) براي رسيدن به يك مكانيسم مناسب برقرار مي شود. اين اتصالات كه هر كدام از آن ها حركت ويژه اي را تامين مي كنند، در نوار ابزار Kinematics Joints قرار گرفته است.

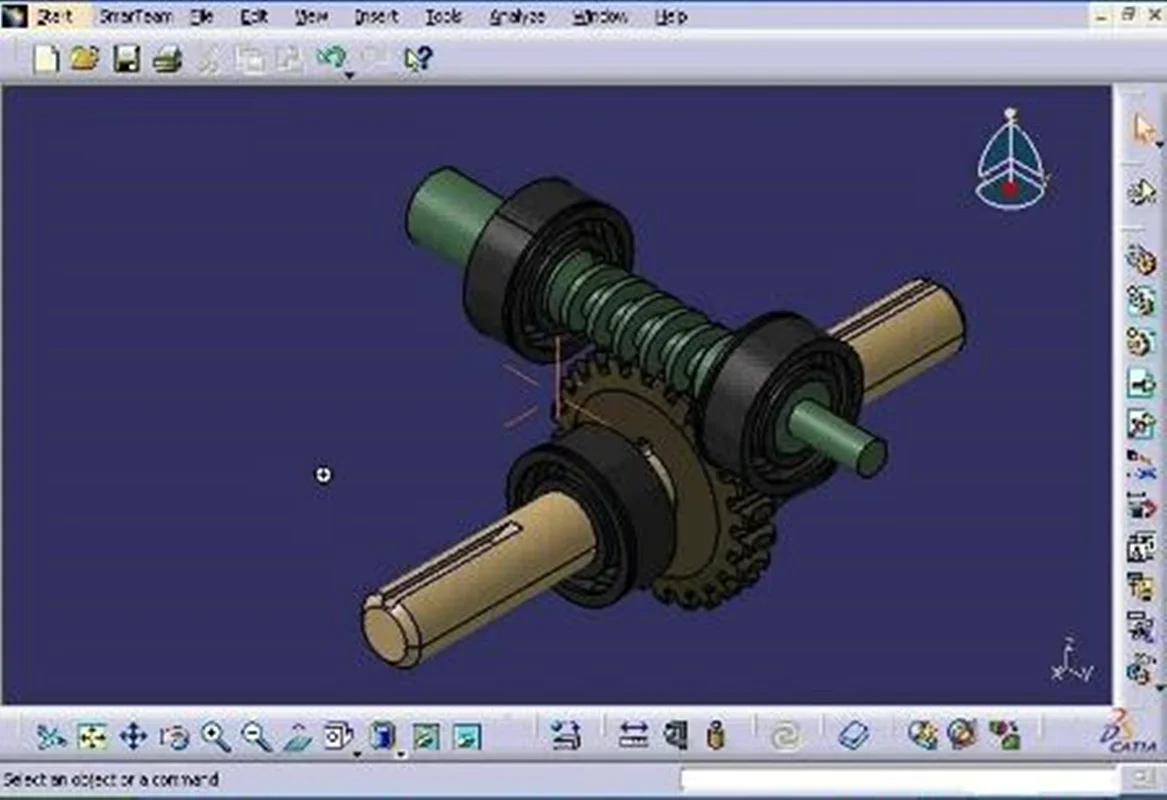
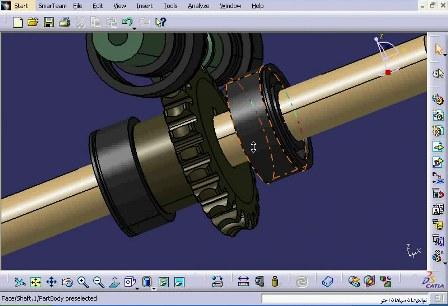
امتياز مثبت محيط هاي كاري CATIA V5 برقراري ارتباط آسان با كاربر در عين قدرتمندي آن ها مي باشد. تمام دكمه ها و پنجره فرمان ها هوشمندانه طراحي شده اند و به نوعي كاربر را در انتخاب عناصر مورد نياز براي اجراي يك فرمان راهنمايي مي كنند. نمونه اي از اين خصوصيت در شكل بالا نشان داده شده است. اين قوانين در طراحي رابط گرافيكي كاربر (Graphical User Interface-GUI) نرم افزار رعايت شده است و باعث كاهش زمان آموزش نيروي انساني براي كاربري اين نرم افزار شده است.
پيشتر، تفاوت مونتاژ قطعات در محيط كاري طراحي مونتاژ و ايجاد يك مكانيسم بيان شد؛ اما قيدهايي که در Assembly Design (محیط مونتاژ کتیا) بر قطعات يك مجموعه مونتاژي قرار داده مي شوند مي تواند با استفاده از ابزاري به اتصال هاي DMU Kinematic Simulator تبديل شوند و ديگر نيازي به مونتاژ دوباره قطعات براي ساخت مكانيسم نيست. پس از ايجاد مكانيسم، با تحليل آن امكان حركت براي مكانيسم با توجه به اتصالات قرار داده شده بررسي مي شود. همچنين طراح مي تواند با استفاده از ابزار هاي ساده مكانيسم را از نظر حداقل فواصل بين قطعات مختلف در حين حركت و برخوردهاي احتمالي بررسي كند. مكانيسم به محض برخورد قطعات از حركت باز مي ايستد تا طراح در جهت رفع اشكال برآيد.
براي بررسي كارايي مكانيسم در حين حركت آن، سرعت ها و شتاب هاي خطي و زاويه اي قطعات قابل اندازه گيري و در گراف هايي قابل مشاهده است. با استفاده از ابزار Sensor مي توان مقدار حركت اجزاي يك مكانيسم را طي متحرك سازي آن در نمودارهايي به صورت وابسته به زمان رسم كرد. به عنوان مثال مي توان طي باز شدن يك جك هيدروليك در طي 15 ثانيه مكان سر جك را در زمان هاي مختلف نسبت به يك مبنا در گرافي مشاهده كرد.
در شبيه سازي مكانيسم مي توان عنصر زمان را دخالت داد و زمان بندي حركت قطعات نسبت به هم را تغيير داد. با استفاده از اين قابليت تقدم و تاخر اجراي حركات ها در شبيه سازي تنظيم مي شود. به عنوان مثال حين فرود يك هواپيما انتظار داريم كه ابتدا درب محفظه ارابه فرود هواپيما باز شود و سپس ارابه فرود باز
شود و در موقعيت مناسب قرار گيرد و در انتها درب محفظه به محل خود باز گردد. اين ترتيب زماني باعث استفاده از ابزار Simulation with Law می شود.
در تمامي محيط هاي كاري CATIA V5 اين امكان وجود دارد كه كاربر از كارهايي كه در محيط نرم افزار انجام مي دهد عكس يا فليم تهيه كند. اين قابليت در DMU Kinematic Simulator نيز به طراح كمك مي كند كه از متحرك سازي مكانيسم فيلم تهيه كند و نحوه حركت مكانيسم را در آن نمايش دهد. ابزار ديگري با نام Swept Volume مكان هندسي يك قطعه را در حين حركت در فضا از لحظه شروع تا پايان حركت به صورت يك حجم ثبت مي كند. اين حجم همانند فايل يك قطعه ذخيره مي شود. حجم ايجاد شده فضايي را كه قطعه مورد نظر در حين حركت از آن عبور مي كند نشان ميدهد و با استفاده از آن احتمال برخورد با ساير قطعات بررسي مي شود.
با فراگیری کامل دروس این بخش و با کمی تمرین و تکرار بیشتر می توان در ایجاد انواع مکانیزم و شبیه سازی حرکت در محیط DMU Kinematic Simulator تبحر کافی پیدا کرد.
فایل های آموزش صوتی تصویری محیط DMU Kinematic Simulator در نرم افزار کتیا CATIA مشتمل بر 9 فایل (حجم فایل ها: 90.3Mb)، زمان آموزش: 37 دقیقه، با فرمت Flash Player، با کیفیت عالی توسط مهندس موسویان به ترتیب زیر گردآوری شده است:
فایل آموزشی 1:
* نحوه ورود به محیط کاری DMU Kinematic Simulator
* ایجاد اتصال پیچشی (Revolute Joint)
* ویرایش شبیه سازی
فایل آموزشی 2:
* ایجاد دو مکانیزم منشوری (Prismatic Mechanism)
* ویرایش مقادیر
* تغییر دادن موقعیت صفر
فایل آموزشی 3:
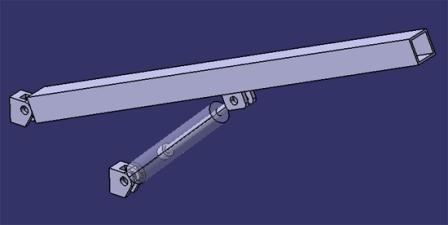
* ایجاد اتصال استوانه ای (Cylindrical Joint)
* شبیه سازی مکانیسم
* تغییر دادن موقعیت صفر
فایل آموزشی 4:
* ایجاد اتصال پیچی (Screw Joint)
* شبیه سازی مکانیسم
* تغییر دادن موقعیت صفر
فایل آموزشی 5:
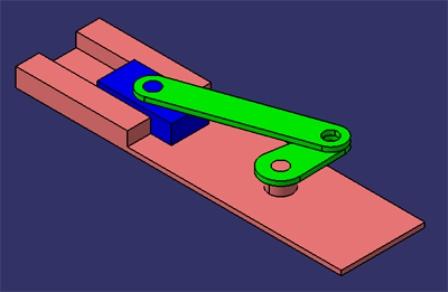
* ایجاد اتصال دو وجهی (Planar Joint)
* استفاده از اتصال دو وجهی در مکانیزم
فایل آموزشی 6:
* نحوه استفاده از اتصال صلب (Rigid Joint) در مکانیزم
فایل آموزشی 7:
* ایجاد مکانیزم نوار لغزنده میل لنگ (Crank Slider)
فایل آموزشی 8:
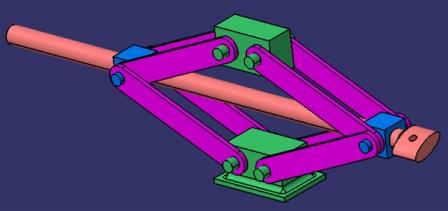
* ایجاد مکانیزم برای جک قیچی ماشین (car scissor jack)
* تغییر محدودیت ها
فایل آموزشی 9:
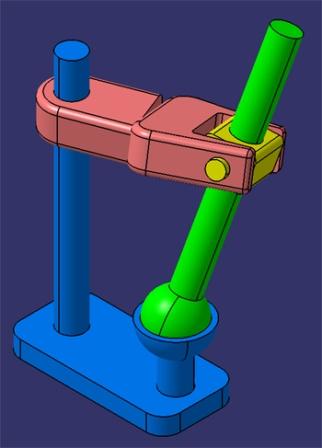
* ایجاد اتصال کروی (spherical joint)
* استفاده از اتصال کروی در مکانیزم
جهت دانلود آموزش شبیه سازی مکانیزم ها DMU Kinematic Simulator در نرم افزار CATIA برلینک زیر کلیک نمایید:
آموزش کتیا، شبیه سازی مکانیزم ها DMU Kinematic Simulator در نرم افزار CATIA



 تکنولوژی ماشینکاری
تکنولوژی ماشینکاری ماشین های ابزار
ماشین های ابزار راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط
راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر
اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه
روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر
جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM
پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM کتاب ماشین های تزریق پلاستیک
کتاب ماشین های تزریق پلاستیک دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator
دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator در نرم افزار CATIA") نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA
نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA") دانلود مجموعه نرم افزارهای تخصصی تهویه مطبوع و گرمایش مهندسی تاسیسات (1)
دانلود مجموعه نرم افزارهای تخصصی تهویه مطبوع و گرمایش مهندسی تاسیسات (1) آموزش متلب، جزوه آموزش برنامه آنالیز قاب دو بعدی به روش تحلیل ماتریسی در نرم افزار MATLAB
آموزش متلب، جزوه آموزش برنامه آنالیز قاب دو بعدی به روش تحلیل ماتریسی در نرم افزار MATLAB در کتیا") آموزش کتیا، جزوه آموزش طراحی چرخدنده ساده با استفاده از فرمول نویسی (طراحی پارامتریک) در کتیا
آموزش کتیا، جزوه آموزش طراحی چرخدنده ساده با استفاده از فرمول نویسی (طراحی پارامتریک) در کتیا در نرم افزار SolidWorks") آموزش سالیدورکس، جزوه آموزش ایجاد الگو متغیر (Variable Pattern) در نرم افزار SolidWorks
آموزش سالیدورکس، جزوه آموزش ایجاد الگو متغیر (Variable Pattern) در نرم افزار SolidWorks آموزش انسیس، مجموعه مقالات و جزوات آموزشی نرم افزار انسیس Ansys
آموزش انسیس، مجموعه مقالات و جزوات آموزشی نرم افزار انسیس Ansys