در ادامه مجموعه های آموزشی قبلی قصد داریم شما را با مجموعه فرامین و دستورات محیط ماشینکاری کتیا Prismatic Machining آشنا نموده و با تمریناتی که در ادامه ارائه می گردد نسبت به دستورات و نوار ابزارهای این محیط تسلط کافی پیدا نمایید.
قبل از شروع این بخش شما بایستی مطالب موجود در آموزش کتیا مقدماتی شامل محیط های Sketcher، Part Design، Wireframe & Surface Design، Drafting را بطور کامل فرا گرفته باشید. این مجموعه های آموزشی قبلا از طریق همین سایت در اختیار کاربران قرار گرفته است و کاربران جدید می توانند با مراجعه به قسمت دسته بندی محصولات (در سمت راست، بالای صفحه سایت) و کلیک بر لینک نرم افزار پیشرفته کتیا CATIA به این مجموعه های آموزشی دسترسی یابند.
با استفاده از مجموعه محیط های آموزش داده شده در کتیا مقدماتی، کاربر قادر خواهد بود یک قطعه ساده و یا پیچیده را در نرم افزار کتیا به صورت سه بعدی بطور کامل مدل سازی نمایید و نیز می تواند نقشه های اجرایی آن را نیز در نرم افزار کتیا تهیه نماید.
مجموعه طراحی پروسه ماشینکاری و استخراج G کدهای دستگاه فرز، این مجموعه در 5 بخش از طریق همین سایت ارائه می گردد. در این مجموعه کاربر می تواند برای قطعات مدل شده در کتیا مقدماتی، روش های ماشینکاری را طراحی نموده و G کدهای مورد نظر را استخراج نماید. بطور کلی حسن این نرم افزار در قسمت طراحی پروسه ماشینکاری و استخراج G کد این است که روش ماشینکاری را در داخل نرم افزار مشاهده نموده و کیفیت سطح تراشیده شده را می توانید بررسی نمایید.
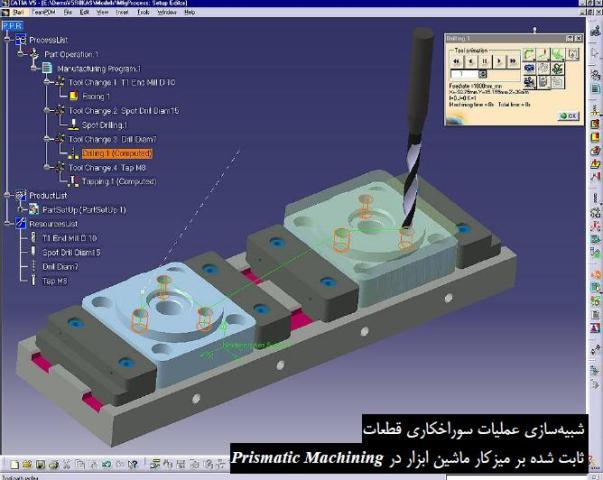
برای وارد شدن به این بخش از منوی کرکره ای Start و زیر منوی Machining بر زیر شاخه Prismatic Machining کلیک می نماییم.
با فراگیری کامل دروس این بخش و با کمی تمرین بیشتر می توانید در طراحی پروسه ماشینکاری و ایجاد G کدهای ماشین های فرز در محیط Prismatic Machining تبحر کافی پیدا نمایید. لازم به ذکر است که هرگونه احتمال خطا در طراحی پروسه ماشینکاری و استخراج G کد برای ماشین های فرز با استفاده از این نرم افزار به سمت صفر میل خواهد نمود و دقت و کیفیت کار افزایش خواهد یافت.
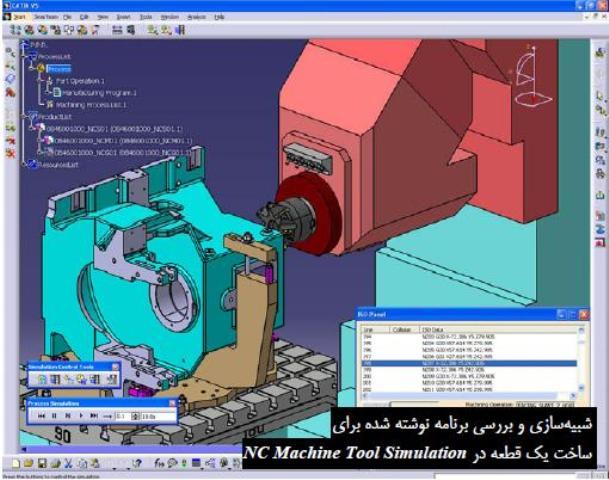
شما می توانید با استفاده از این نرم افزار، فرزکاری یک قطعه را در نرم افزار کتیا شبیه سازی نمایید و به صورت واقعی آن را مشاهده کنید. همچنین می توان سطح فرزکاری را پس از ماشینکاری در کامپیوتر مشاهده نمایید و هرگونه عیبی را قبل از اینکه روی قطعه کار واقعی عملیاتی را انجام دهید لغو کنید. با استفاده از این روش احتمال معیوب شدن قطعات و خرابی در ابعاد و اندازه ها به سمت صفر میل می کند و از اتلاف زمان، انرژی و هزینه جلوگیری می کند. این مسئله اهمیت فراگیری این بخش را تا حدودی بیان می نماید.

در ادامه امیدواریم که توانسته باشیم حسن مطلب را برای شما دوست گرامی ادا کرده باشیم. قبلا از حسن توجه و اعتماد شما به سایت اینترنتی کتیا طراح برتر کمال تشکر را داریم و آرزوی موفقیت شما را از خداوند منان خواهانیم.
در قسمت اول این مجموعه آموزشی شما با مجموعه دستورات موجود در نوار ابزار Manufacturing Program در محیط Prismatic Machining به ترتیب زیر آشنا می شوید:
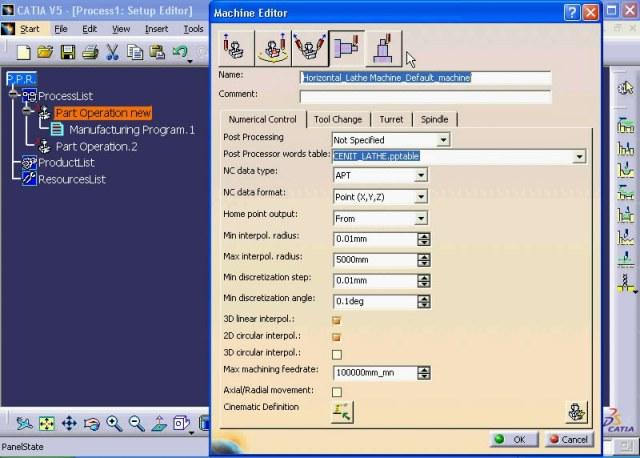
* Start & Initial Setting
* Part Operation
* Manufacturing Program
جهت دانلود آموزش صوتی تصویری محیط طراحی پروسه ماشینکاری و استخراج G کدهای دستگاه فرز Prismatic Machining در نرم افزار کتیا CATIA - قسمت اول برلینک زیر کلیک نمایید:






 تکنولوژی ماشینکاری
تکنولوژی ماشینکاری ماشین های ابزار
ماشین های ابزار راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط
راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر
اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه
روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر
جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM
پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM کتاب ماشین های تزریق پلاستیک
کتاب ماشین های تزریق پلاستیک دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator
دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator در نرم افزار CATIA") نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA
نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA نرم افزار کتیا CATIA") آموزش کتیا، جزوه آموزش محیط های مقدماتی (مدلسازی، مونتاژ، نقشه کشی) نرم افزار کتیا CATIA
آموزش کتیا، جزوه آموزش محیط های مقدماتی (مدلسازی، مونتاژ، نقشه کشی) نرم افزار کتیا CATIA آموزش آباکوس، جزوه آموزش شبیه سازی راکت تنیس با نرم افزار ABAQUS
آموزش آباکوس، جزوه آموزش شبیه سازی راکت تنیس با نرم افزار ABAQUS جزوه آشنایی با انواع یاتاقان ها
جزوه آشنایی با انواع یاتاقان ها در محیط Generative Shape Design نرم افزار CATIA") آموزش کتیا، طراحی و مدلسازی پره فن (Fan blade) در محیط Generative Shape Design نرم افزار CATIA
آموزش کتیا، طراحی و مدلسازی پره فن (Fan blade) در محیط Generative Shape Design نرم افزار CATIA