جزوه آموزش محیط طراحی قطعه پیشرفته Part Design نرم افزار کتیا CATIA یک جزوه کامل از مدل سازی پیشرفته کتیا است که مشتمل بر 261 صفحه، در 8 فصل، تایپ شده، به زبان انگلیسی خیلی روان و به همراه تصاویر رنگی، توسط شرکت ان وی سیستم (NV Systems) به ترتیب زیر گردآوری شده است:
فصل 1: طراحی و مدل سازی پیستون (Piston):
در فصل اول از این مجموعه آموزشی، طراحی و مدل سازی پیستون (Piston) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Creating the Main Pad
Step 2: Creating the Symmetrical Cut-out
Step 3: Creating the Cylindrical Boss
Step 4: Creating Pockets
Step 5: Creating a Through Hole
Step 6: Creating Fillets
Step 7: Changing the color
فصل 2: طراحی و مدل سازی قلاب زاویه دار (Angle Bracket):
در فصل دوم از این مجموعه آموزشی، طراحی و مدل سازی قلاب زاویه دار (Angle Bracket) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Setting Part Design Parameters
Step 2: Defining the Pads for the Bracket
Step 3: Defining the Pilot Holes and the Angular Pads for the Bracket
Step 4: Defining the Clevis Through Hole and Fillets
فصل 3: طراحی و مدل سازی لولا (Building the Hinge):

در فصل سوم از این مجموعه آموزشی، طراحی و مدل سازی لولا (Building the Hinge) به طور کامل، به کاربر آموزش داده می شود.
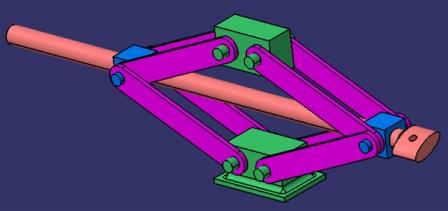
فصل 4: طراحی و مدل سازی پشتیبان جک ماشین (Car Jack Support):
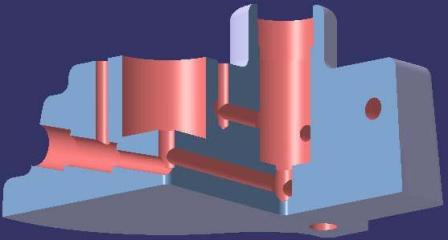
در فصل چهارم از این مجموعه آموزشی، طراحی و مدل سازی پشتیبان جک ماشین (Car Jack Support) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Creating Profiles and Pads
Step 2: Creating Draft Angles
Step 3: Creating Edge Fillets
Step 4: Creating Additional Profiles and Pads
Step 5: Creating Edge Fillets for the Additional Pads
Step 6: Creating Holes
Step 7: Creating Grooves
Step 8: Creating a Chamfer
Step 9: Creating Pockets
Step 10: Creating Edge Fillets
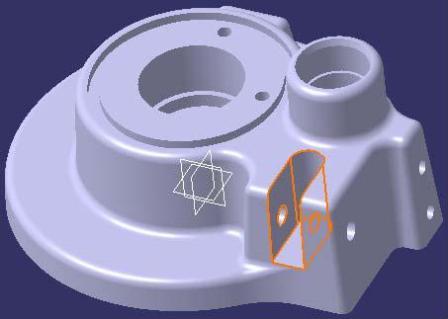
فصل 5: طراحی و مدل سازی سمت کلگی ابزار (Side Toolhead):

در فصل پنجم از این مجموعه آموزشی، طراحی و مدل سازی سمت کلگی ابزار (Side Toolhead) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Creating Profiles, Pads and Draft Angles
Step 2: Creating Pockets and Draft Angles
Step 3: Creating Profiles, Pads and Draft Angles
Step 4: Creating Holes
Step 5: Creating Pockets
Step 6: Creating Fillets
Step 7: Creating Chamfers
فصل 6: طراحی و مدل سازی اتصالات سه راهی (Tee Fitting):
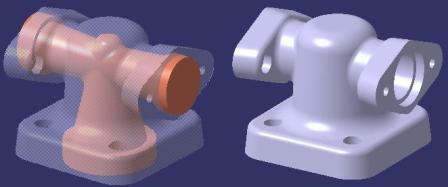
در فصل ششم از این مجموعه آموزشی، طراحی و مدل سازی اتصالات سه راهی (Tee Fitting) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Creating Pads
Step 2: Draft Angles and Fillets
Step 3: Holes Creation
Step 4: Mirroring
Step 5: Mold Core: Shaft Creation
Step 6: Mold Core: Filleting
Step 7: Mold Core: Shaft Creation
Step 8: Mold Core: Filleting
Step 9: Removing Body
فصل 7: طراحی و مدل سازی پیچ چرخ گوشت (Meat Mincer Screw):

در فصل هفتم از این مجموعه آموزشی، طراحی و مدل سازی پیچ چرخ گوشت (Meat Mincer Screw) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Creating Profiles and Helixes
Step 2: Creating a Loft
Step 3: Creating Tri-Tangent Fillets
Step 4: Creating Variable Radius Fillets
Step 5: Creating a Pad
Step 6: Creating a Groove
Step 7: Creating a Pad
Step 8: Creating a Hole
Step 9: Creating a Chamfer
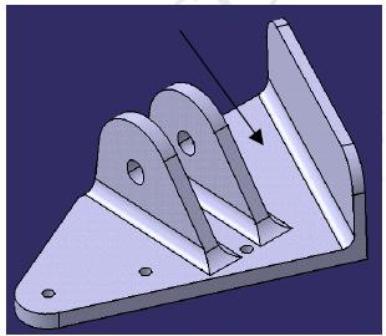
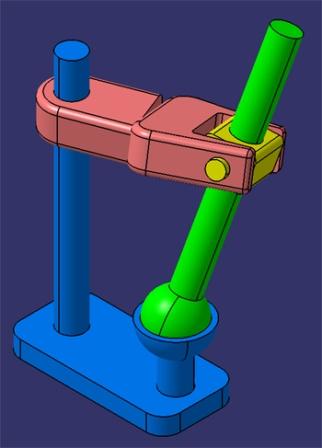
فصل 8: طراحی و مدل سازی پشتیبان پدال (Pedal Support):

در فصل هشتم از این مجموعه آموزشی، طراحی و مدل سازی پشتیبان پدال (Pedal Support) به طور کامل، طی مراحل زیر به کاربر آموزش داده می شود:
Step 1: Rib Creation
Step 2: Circular Pattern
Step 3: Tri-Tangent Fillets
Step 4: Filleting
Step 5: Rib Creation
Step 6: Filleting
Step 7: Pad Creation
Step 8: Filleting
Step 9: Hole Creation
Step 10: Circular Pattern
Step 11: Threaded Hole Creation
Step 12: Assembling the Crank Set
* توجه: کاربران نگران زبان انگلیسی جزوات نباشند. حتی کاربرانی که سر انگشتی زبان انگلیسی یاد دارند قادر خواهند بود از این جزوات به عنوان تمرین های عملی پیشرفته بهره لازم را ببرند، زیرا همان طور که در هر فصل در بالا مشخص نمودیم، مدل سازی قطعات به صورت پله پله (Step to Step) همراه با تصاویر واضح بوده و کاربر فقط کافی است از قبل یک آشنایی کلی با دستورات محیط Part Design داشته که قبلا از طریق همین سایت نیز محیط مدل سازی سه بعدی کتیا (Part Design) به صورت کامل آموزش داده شده است.
جزوه با فرمت PDF بوده و به راحتی بر روی گوشی های اندروید و کامپیوتر قابل استفاده می باشد.
جهت دانلود جزوه آموزش محیط طراحی قطعه پیشرفته Part Design نرم افزار کتیا CATIA برلینک زیر کلیک نمایید:
آموزش کتیا، جزوه آموزش محیط طراحی قطعه پیشرفته Part Design در نرم افزار کتیا CATIA


 تکنولوژی ماشینکاری
تکنولوژی ماشینکاری ماشین های ابزار
ماشین های ابزار راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط
راهنمای قوی و جامع سالیدورکس 2015 برای کاربران مبتدی و سطح متوسط اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر
اصول تفکیک آپارتمان ها و نحوه کار با نرم افزار واسط کاداستر روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه
روش های اجزاء محدود مقدماتی پروفسور عیسی سلاجقه جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر
جزوه آموزشی درس طراحی مکانیزم های دانشگاه امیر کبیر پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM
پروژه مدلسازی و شبیه سازی توربین بادی مجهز به DFIG و STATCOM کتاب ماشین های تزریق پلاستیک
کتاب ماشین های تزریق پلاستیک دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator
دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator در نرم افزار CATIA") نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA
نحوه ایجاد رزوه های اینچی (Inch Thread) در نرم افزار CATIA کتاب مبانی دینامیک خودرو
کتاب مبانی دینامیک خودرو مقاله با عنوان: بهینه سازی مصرف انرژی در تایر
مقاله با عنوان: بهینه سازی مصرف انرژی در تایر نرم افزار ان ایکس NX uni") آموزش ان ایکس، کتاب آموزش جامع (مدلسازی، سطح سازی، ورقکاری، نقشه کشی و آنالیز) نرم افزار ان ایکس NX uni
آموزش ان ایکس، کتاب آموزش جامع (مدلسازی، سطح سازی، ورقکاری، نقشه کشی و آنالیز) نرم افزار ان ایکس NX uni کتاب برنامه سازی و برنامه نویسی پیشرفته
کتاب برنامه سازی و برنامه نویسی پیشرفته") پروژه توليد كرانويل و پينيون (Production of Crown Wheel & Pinion)
پروژه توليد كرانويل و پينيون (Production of Crown Wheel & Pinion)